HDC Otomasyon | Endüstriyel Otomasyon Hizmetleri
Hayatımızı kolaylaştıran robotların yanında bir de bunun öncesi olan iş yaşamımızı daima kolaylaştıran endüstriyel robotlar var. Endüstriyel robotların bir vida sıkımından kutuları istiflemeye kadar birçok alanda kullanımı hem zamandan, hem iş gücünden hem de maddi olarak kazanım sağlar.
Endüstriyel bir robot, üç ya da daha fazla eksende otomatik olarak kontrol edilen, yeniden programlanabilir, çok amaçlı manipülatör olarak tanımlanır. Robotik alanda ise daha pratik çalışma, tasarlama ve kullanım olarak tanımlanabilir.

Robot deyince insanların aklına ilk karmaşık işler yapabilen cihazlar geliyor. Ama sadece bir robot büyük bir fabrikada sadece minik bir vidayı sıkmakla yükümlendirilmiş olabilir ya da büyük karışık malzemeleri boyutlarına göre ayıran bir robot varlığını da düşünebiliriz. Yani kısaca robot işimizi hangi boyutta olursa olsun kolaylaştıran bir tasarımdır.
Robotların Sınıflandırılması
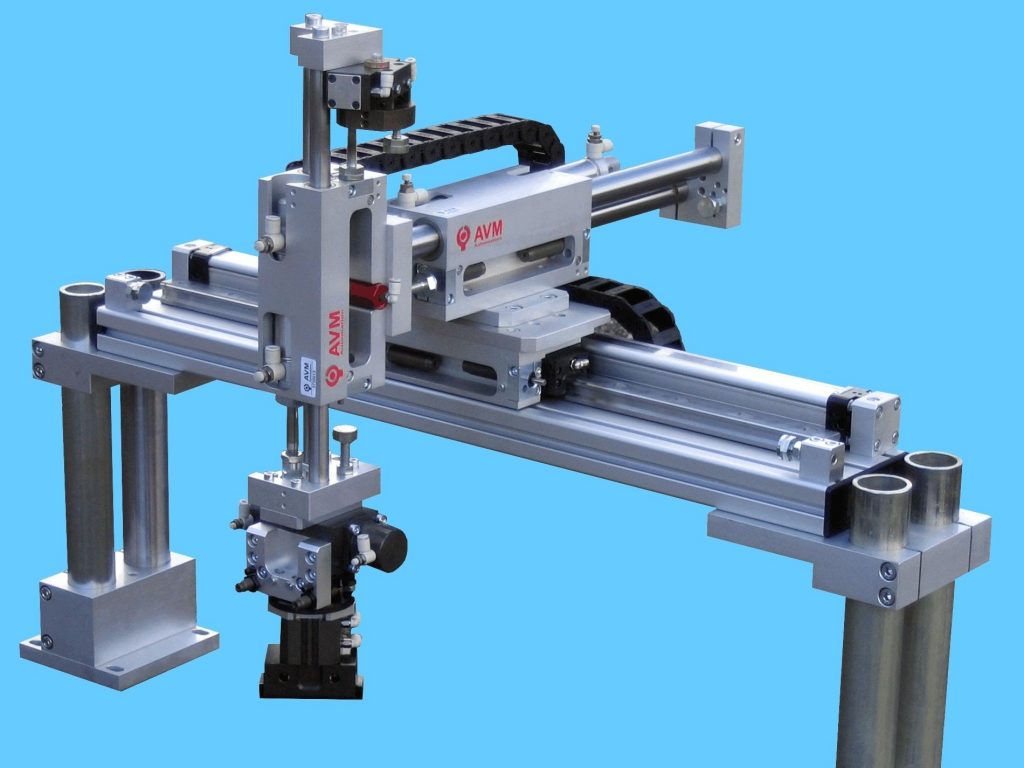
1-) Kartezyen Manipülatör
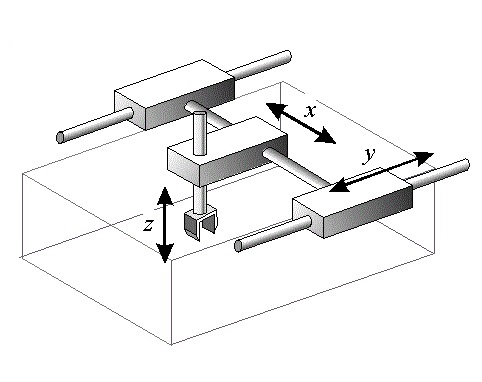
Bu tip çalışmada robotun birbirine dik olarak kayan eklemleri mevcuttur. Yani x,y,z koordinatlarında birbirine dik hareketler gerçekleştirilir. Mekanik yönden çok sağlam olmasına rağmen çalışma alanındaki hareket yeteneği bakımından zayıf olması bir dezavantajdır. Basit yapı tasarımından dolayı kolların hareketi kolaydır. Bir yere ulaşması için hesaplanacak yol çok basit olarak bulunabilir. Bu robot tipi çok büyük boyutlarda ve ağırlıklarda nesneleri hareket ettirmek, taşımak için optimum seçimdir.
2-) Silindirik Manipülatör
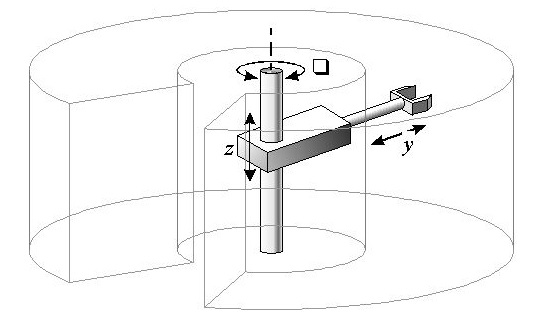
Adından da anlaşılacağı üzere silindirik koordinatlarda hareket eden robot tipidir. Kollarından biri düşeyde, diğeri radyal doğrultuda hareket ederek işlemleri gerçekleştirir. Bir temel yatağı etrafında dönebilen ve diğer iki uzvu taşıyan ana bir desteğe sahip robotlardır. Bu tip manipülatörler de mekanik yönden sağlamdır fakat bilek konum doğruluğu yatay harekete bağlı olarak azalır. Kartezyen manipülatör de olduğu gibi büyük boyutlu nesnelerin taşınmasında kullanılırlar. Bu tip manipülatörler de hidrolik motorlar tercih edilir. Yapılması gereken iş ve hedefin aynı doğrultuda olmadığı montaj işlerinde çoğunlukla silindirik manipülatörler kullanılır. Robotun dönüş kabiliyeti çok yüksek olduğundan belirli bir doğrultuda olmayan işlerde kartezyen koordinatlı robotlara göre çok hızlıdırlar.

3-) Küresel Manipülatör
Bu tip bir manipülatör iki tane döner ve bir tane kayar tip eklemden meydana gelmektedir. Bu tip manipülatörler mekanik açıdan silindirik ve kartezyen manipülatöre göre daha zayıf, mekanik yapı yönünden diğerlerinden daha karmaşıktır. Elektrik motorlarının tercih edildiği bu robot tipi çoğunlukla makine montajlarında kullanılırlar. Kola ait uzuvlardan biri doğrusal hareket yapabilecek, bunu destekleyen diğer uzuvlardan biri temele dik olan eksen etrafında, diğeri de bu eksene dik ve temele paralel bir eksen etrafında dönmektedir. Dikey hareket kolun açısal hareketiyle tutucunun aşağı ve yukarıya çıkabileceği kadardır. Cilalama, transfer işlemlerinde, test ve kontrolde ağırlıklı olarak bu manipülatör tipleri kullanılmaktadır.

4-) Mafsallı Manipülatör
İnsan kol yapısı kıstas alınan bu tip manipülatörler tüm eklemleri döner olduğundan en yetenekli robotlardır. Boyama, kaynak yapma, montaj, yüzey temizleme vb. gibi endüstriyel uygulamalarda geniş kullanım alanına sahiptirler. Elektrik motorların tercih edildiği bu manipülatörler kontrol işlemindeki zorluklar nedeniyle bu koordinat sistemi robot tekniğinde geç uygulama alanı bulabilmiştir. Maksimum derece hareket imkanı sağlayan bu robotlar kabiliyet bakımından en iyi robot çeşitlerindendir.